Мы задумылись о создании Роботизированного Реабилитационный Комплекса для Восстановления Походки - тренажера, предназначенного для реабилитации походки пациентов с сильными неврологическими нарушениями.

Данная идея обсуждалась нашим коллективом давно - многие из нас столкнулись с острой нуждой в подобном аппарате для реабилитации близких людей после травм конечностей и инсультов ещё в довоенное время. Велико также было наше разочарование, когда выяснилось, что в Украине таких установок нет и не предвидится. Стоимость готовых установок в других странах также не радовала.
Основываясь на нашём богатом опыте реализации Автоматизированных Систем Управления Технологическими Процессами (автоматизации производств), мы посчитали, что вполне способны спроектировать данный аппарат сами.
Суть аппарата следующая: экзоскелет двигает конечностями пациента по заданной программе - данная процедура восстанавливает нейронные связи в мозге, фактически заново обучая человека ходить.
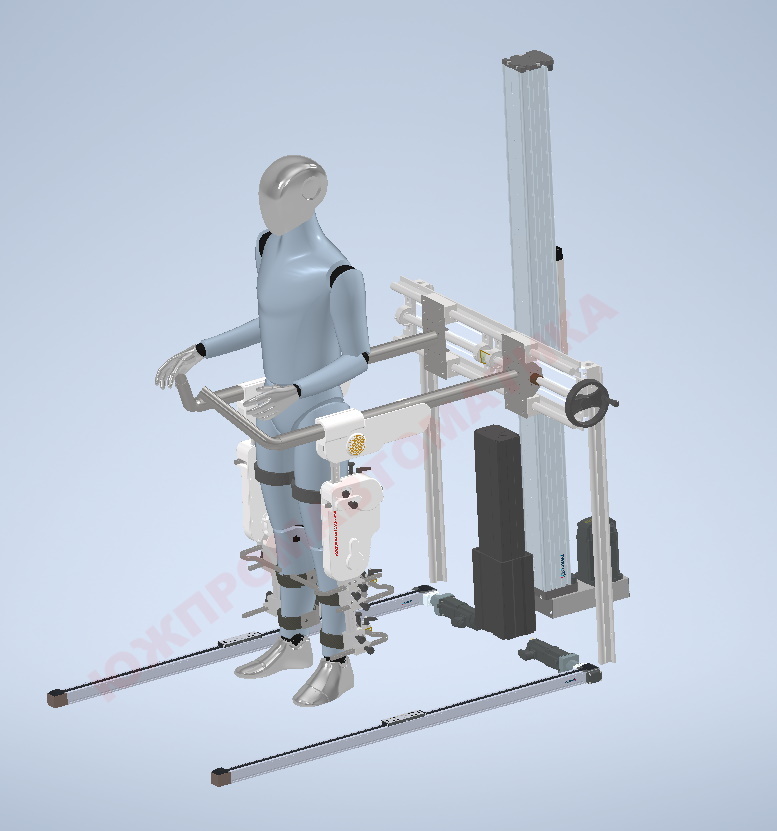
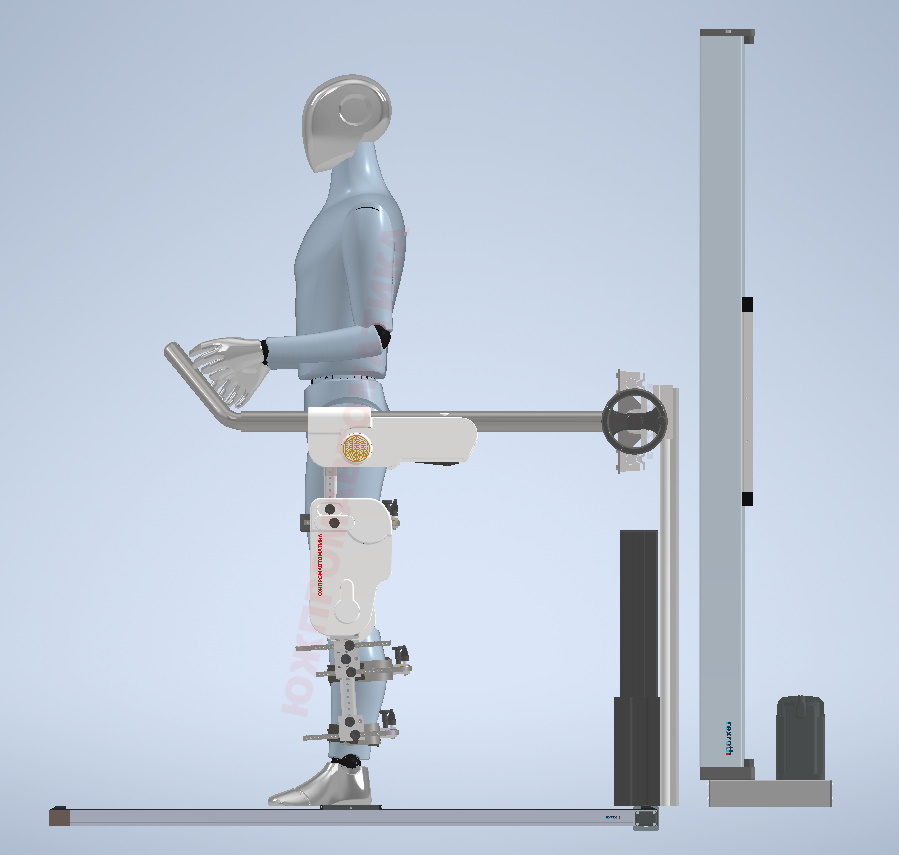
Устройство выполнено в виде установки с экзоскелетом, к которому сверху крепится система поддержки веса (пациента). Пациенту на ноги надевается экзоскелет, а также он помещается на специальную беговую дорожку, скорость которой зависит от программы реабилитации. Алгоритм выбирается из набора готовых решений или может подбираться индивидуально под каждого пациента. В руках пациент держит интуитивно понятную систему управления тренажером. С помощью готовых вариантов может меняться интенсивность тренировок. Напротив пациента закреплены экраны, где демонстрируются мотивирующие задачи, а также выводится обратная связь об успехах, что также стимулирует пациента учиться ходить.
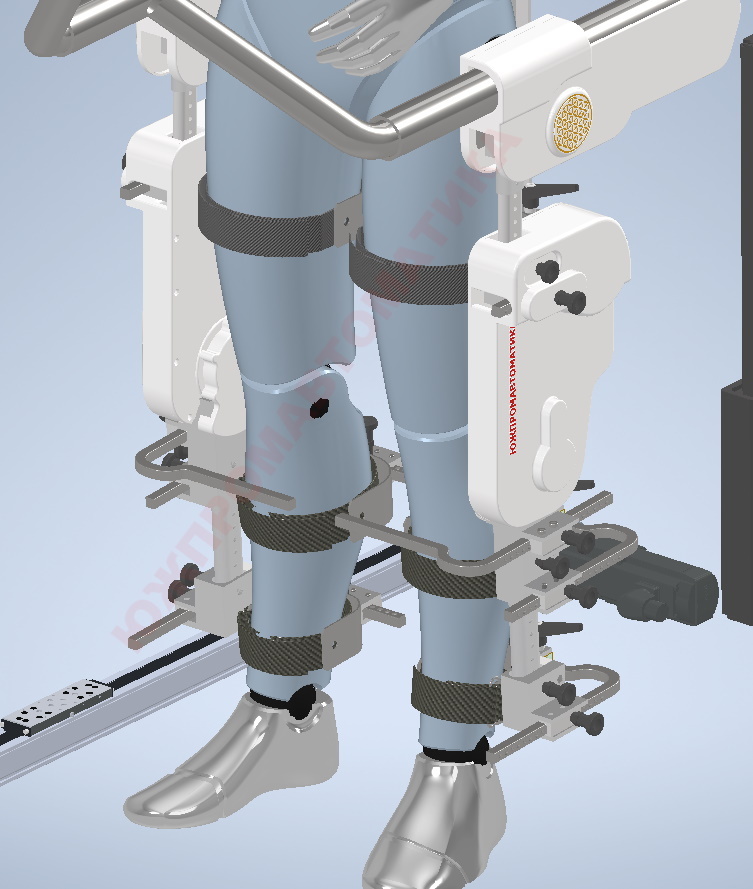
Мы начали с проектирования простого механизма движения ноги:
По мере продумывания идеи наш инженерный проект становился всё более комплексным: мы добавили элементы беговой дорожки и опроного механизма, , а также механизмы настройки установки под разные габариты пациентов.
Мы продолжаем разработку инженерного проекта.